Temps de lecture : 7 minutes
 Les chariots automatiques AGV (acronyme de la terminologie anglaise Automatic Guided Vehicle) sont des robots entièrement autonomes qui déplacent et transportent des charges (sur palettes ou non) sans aucune intervention humaine, dans des sites de production, des entrepôts et des centres de distribution. Pour leurs permettre de se mouvoir et d’assurer les missions pour lesquelles ils ont été programmés, les robots utilisent un système de guidage particulier et/ou une combinaison de systèmes de guidage.
Les chariots automatiques AGV (acronyme de la terminologie anglaise Automatic Guided Vehicle) sont des robots entièrement autonomes qui déplacent et transportent des charges (sur palettes ou non) sans aucune intervention humaine, dans des sites de production, des entrepôts et des centres de distribution. Pour leurs permettre de se mouvoir et d’assurer les missions pour lesquelles ils ont été programmés, les robots utilisent un système de guidage particulier et/ou une combinaison de systèmes de guidage.
Bien connaître des différents modes de guidage des AGV vous aidera dans votre projet d’automatisation.
L’autonomie d’exécution et la précision sont les éléments-clés du succès d’un projet AGV, c’est pour cela que le choix de la technologie de guidage est essentiel.
Guidage laser

Le guidage laser est le système de guidage AGV le plus répandu dans l’univers des chariots automatiques (80% du marché).
Cette technologie se base sur la triangulation laser.
Triangulation laser qu’est-ce c’est ?
Un champ laser est projeté depuis l’AGV sur au moins deux réflecteurs. Ces réflecteurs ont pour fonction de renvoyer la lumière projetée vers sa source. La lumière réfléchie est alors représentée selon un certain angle sur le récepteur. En s’appuyant sur l’angle entre le sens d’émission et de réception, la position du chariot automatique est calculée à l’aide de relations triangulaires.
Mise en œuvre physique de la triangulation :
Des réflecteurs sont disposés sur le trajet du chariot, chaque déflecteur étant installé selon un angle bien précis. Chaque zone dans laquelle l’AGV doit circuler est identifiée par ce dernier grâce à la combinaison de 4 à 5 réflecteurs possédant chacun un angle qui lui est propre.
Cela va permettre au robot de savoir en permanence où il se trouve dans la zone d’opération en comparant les angles mesurés avec la cartographie qui lui a été implantée dans son système.
Les avantages du guidage laser sont :
– La meilleure précision de toutes les technologies de guidage (précision de 10 mm),
– des vitesses de conduite plus élevées,
– aucune contrainte de génie civil,
– le robot sait en permanence à quel endroit il se trouve et n’a pas besoin de repasser par une position physique de réinitialisation pour être redémarré.
Inconvénient :
– Ne fonctionne pas si présence de lumière directe du soleil.
Filoguidage

Cette technologie éprouvée est utilisée lors de l’emploi des chariots de préparation pour allées étroites comme les matériels tridirectionnels.
Le filoguidage courant porteur qu’est-ce que c’est ?
Le filoguidage consiste à placer dans une saignée de faible profondeur pratiquée dans le sol, un fil conducteur parcouru par un courant de faible intensité et de fréquence déterminée, émis par un générateur de fréquence.
Le champ créé par le passage de ce courant est capté par des bobines de détection installées sur le capteur de position présent sur le matériel AGV. Les informations issues de ces bobines permettent le centrage permanent du robot sur la trajectoire définie par le fil.
On pourra utiliser ce mode de guidage lorsque les infrastructures ne permettent pas la pose de réflecteurs pour le laser guidage, où lorsque les environnements de travail de l’AGV ne permettent pas l’usage correct des réflecteurs comme dans les endroits exposés à une lumière du soleil directe et/ou les endroits trop étroits.
Avantage :
– Trajectoire de déplacement d’une grande précision.
Inconvénients :
– Génie civil,
– Gestion des fréquences,
– Pas de flexibilité d’installation,
– Nécessite de repasser obligatoirement par un point de réinitialisation géographique pour que le robot puisse se resituer au sein de la zone dans laquelle il travaille.
Guidage par aimant

Il est le meilleur complément au guidage laser, notamment dans les endroits où l’utilisation de réflecteurs n’est pas possible, comme :
– Lieu où il n’y a pas d’infrastructure pour poser les réflecteurs,
– Lieu trop lumineux (par exemple lorsqu’un AGV sort d’un bâtiment pour rentrer dans un autre,
– Zones de stockage de masse, comme les stockages de bobines,
– Lieu où l’environnement est évolutif et où les réflecteurs ne sont pas toujours visibles.
Le guidage par aimant qu’est-ce que c’est ?
Le guidage par aimant consiste à matérialiser un chemin de déplacement grâce à la pose d’aimants affleurant à la surface et à équidistance les uns des autres.
Le champ magnétique des aimants est capté par les capteurs de position présents sur le matériel AGV.
Les avantages du guidage par aimant :
– Très bonne précision de guidage (précision de 10 mm) si l’équidistance optimale entre les aimants est respectée.
Les inconvénients du guidage par aimant :
– Génie civil obligatoire,
– Pas de flexibilité,
– Nécessite de repasser obligatoirement par un point de réinitialisation géographique pour que le robot puisse se resituer au sein de la zone dans laquelle il travaille.
Les Tags RFID peuvent être une alternative aux aimants, plus facile à installer mais ils sont plus fragiles.
Qu’est-ce que la RFID (Radio Frequency Identification) ?
La RFID est un système qui permet de mémoriser et de récupérer des données à distance. C’est le transfert d’énergie électromagnétique entre une étiquette radio et un émetteur RFID qui active le système. Le tag radio est composée d’une puce électronique et d’une antenne. Il peut ainsi recevoir un signal radio émis par le lecteur RFID qui équipe le matériel. Les composants permettent à la fois de lire et de répondre aux signaux.
Navigation par QR Code
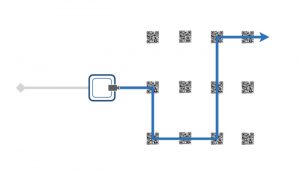
Une matrice de QR codes déposée contenant les informations de localisation et les instructions à suivre est disposée sur le sol. Les QR codes sont lus par les AGV à l’aide d’une caméra embarquée.
Les avantages de la navigation inertielle de QR Code :
– Mise en œuvre rapide
– Une mise en œuvre ne nécessitant pas de génie civil
– Flexibilité
Les inconvénients de la navigation inertielle de QR Code :
– Missions limitées
– Installation « fragile » car peu ou pas protégée
Filoguidage par bande magnétique

Ou encore appelé filoguidage magnétique passif, technologie à mi-chemin entre le filoguidage et le guidage par aimant.
Le guidage par bande magnétique qu’est-ce que c’est ?
Le guidage par bande magnétique consiste à matérialiser un chemin de déplacement grâce à la pose de bande adhésive magnétique, recouverte ou non de résine.
Le champ magnétique de la bande adhésive est capté par les capteurs de position présents sur le matériel AGV.
Les avantages du Filoguidage par bande magnétique :
– Une bonne précision de guidage (précision de 10 mm)
– Une mise en œuvre ne nécessitant pas de génie civil
– Flexibilité nécessitant de matérialiser le nouveau chemin par la pose de nouvelle bande magnétique.
Les inconvénients du guidage par Filoguidage par bande magnétique :
– Nécessite de repasser obligatoirement par un point de réinitialisation géographique pour que le robot puisse se resituer au sein de la zone dans laquelle il travaille.
– Installation « fragile » car peu ou pas protégée
Navigation naturelle

Principe de fonctionnement : La cartographie du site est implémentée dans le chariot AGV.
Un parcours est réalisé avec le robot pour que celui-ci détecte les potentiels points fixes qui sont ensuite validés par les ingénieurs en charge de l’installation des robots.
Avantages :
Aucune infrastructure ou repère physique à installer.
Inconvénients :
– Moins précis que les autres technologies de guidage (précision 30 à 50 mm),
– Si un des points fixes est désinstallé ou masqué, cela implique la nécessité de refaire une cartographie complète du secteur concerné et de recalibrer tous les robots affectés à la zone,
– Nécessite de repasser obligatoirement par un point de réinitialisation géographique pour que le robot puisse se resituer au sein de la zone dans laquelle il travaille.
Conclusions
Si les technologies de navigation ne sont pas de prime abord opposables, il est néanmoins nécessaire d’avoir en tête qu’il faudra choisir sa navigation en tenant compte de deux critères
– La technologie la mieux adaptée à l’espace d’évolution du matériel AGV
– La technologie la plus précise
Le laser guidage permet en général une vitesse d’exécution plus élevée étant donné que la position est calculée plus fréquemment que les autres technologies, même si l’utilisation plus fréquente de l’odométrie impose de ralentir davantage sur quelques centimètres.
En contrepartie, le laser guidage et la navigation naturelle sont plus soumis aux perturbations environnementales.
La répétabilité des cycles amènera sans aucun doute à des écarts physiques d’exécution si la précision de la technologie de guidage n’est pas au rendez-vous. Cet état de fait générera des problèmes de production, la nécessité de recalibrer le matériel de manière régulière et des interactions homme-machines plus nombreuses ce qui serait paradoxal puisque la réussite d’un projet AGV réside dans la parfaire autonomie du robot mis en production.